Analisa
Perbandingan Efisiensi Energi Dari Penempatan Rangkaian Pengontrol Kecepatan Motor Induksi Kapasitor Running Satu Fasa, 220
Volt, 30 Watt, 1370 RPM, Yang
Terhubung Pada Suplai Dengan Yang Terhubung
Pada Main Winding
Abstrak
Analisa
rangkaian pengontrol kecepatan motor induksi kapasitor running satu fasa, 220
Volt, 30 Watt, 1370 Rpm, yang terhubung pada suplai dengan yang terhubung pada
kumparan utama (main winding). Pengujian yang dilakukan adalah mengamati
besarnya torsi, arus, cos ɸ, daya input dan efesiensi pada berbagai kecepatan
motor. Dari hasil pengujian terhadap dua rangkaian pengontrol kecepatan yang
ditempatkan pada kumparan utama (main winding) dan suplai didapatkan bahwa
rangkaian pengontrol kecepatan di kumparan utama (main winding) 10% lebih
efisien dibandingkan dengan yang ditempatkan pada suplai.
Pengontrol kecepatan yang diletakan
pada main winding tidak mempengaruhi tegangan input pada auxiliary winding, hal
inilah yang menyebabkan penempatan pengontrol pada main winding menjadi lebih
efisien.
Pendahuluan
Motor induksi dengan kapasitor
running adalah jenis motor yang banyak digunakan untuk aplikasi sehari-hari maupun
untuk aplikasi industri. Pengontrolan kecepatan sangat diperlukan apabila motor
tersebut akan digunakan untuk kecepatan yang diinginkan. Pengontrolan yang
dilakukan haruslah mempunyai efisiensi energi yang baik. Jenis pengontrolan
biasanya dilakukan dengan menggunakan
triac yang terhubung langsung pada sumber. Selain itu adapula pengon- trolan
yang dilakukan dengan menghubung- kan triac pada main winding. Dari kedua jenis
pengontrolan ini akan dibandingkan rangkaian manakah yang mempunyai efesiensi
energi paling baik.
Konsep Dasar Pengaturan Kecepatan
Motor
Ada
beberapa cara atau metoda untuk mengatur kecepatan putaran motor induksi
yaitu :
1. Pengaturan tahanan luar pada rotor
2. Merubah jumlah pasang kutub
3. Merubah tegangan yang diberikan ke motor
4. Merubah frekwensi yang diberikan ke motor
Pada pengontrol kecepatan motor yang
digunakan pada makalah ini adalah pengotrol kecepatan yang dilakukan dengan
mengubah tegangan yang diberikan ke motor. Komponen utama yang digunakan dalam
pengontrolan ini adalah triac.
Metoda
penempatan pengontrol kecepatan

Gambar 1. Pengontrol Kecepatan Diletakan Pada Suplai

Gambar 2. Pengontrol Kecepatan Diletakan Pada Main
Winding
Dari
gambar diatas terlihat bahwa
pada gambar 1, rangkaian pengontrol
kecepatan yang diletakan pada
suplai akan mengatur besarnya tegangan pada kumparan utama (main winding)
dan kumparan bantu (auxiliary winding) sedang- kan pada gambar
2, rangkaian pengontrol hanya mengatur besarnya tegangan pada kumparan utama (main winding).
Pengambilan data pada motor terbeban
Dari hasil pengukuran motor yang
terbeban didapatkan berbagai macam karakteristik dari penempatan rangkaian
pengatur kecepatan yang berbeda. Gambar dibawah menunjukan grafik karakteristik
Arus, cos ɸ, P input,
Torsi, dan Efisiensi motor. Rangkaian pengontrol kecepatan yang terhubung pada
suplai disebut sebagai rangkaian 1 dan rangkaian yang terhubung pada main winding
disebut sebagai rangkaian 2.

Gambar 3. Grafik Karakteristik Arus Sebagai Fungsi Kecepatan

Gambar 4. Grafik Karakteristik Cos j Sebagai Fungsi Kecepatan

Gambar 5. Grafik Karakteristik P Input Sebagai Fungsi
Kecepatan

Gambar 6. Grafik Karakteristik Torsi Sebagai Fungsi Kecepatan

Gambar 7. Grafik Karakteristik Efisiensi Sebagai Fungsi
Kecepatan
Bentuk grafik karakteristik arus
sebagai fungsi kecepatan pada gambar 3 memperlihatkan bahwa pada kecepatan dibawah kecepatan
nominal (1000 – 1200 rpm) arus pada rangkaian I lebih besar rata-rata 0,01%
dari pada rangkaian II sedangkan pada kecepatan mendekati kecepatan nominal
arus pada rangkaian I sama dengan arus pada rangkaian II.
Dari gambar 4 terlihat bahwa pada rangkaian 2 memiliki cos
ɸ yang lebih baik rata-rata 0,029 dibandingkan dengan rangkaian 1. Hal ini
terjadi, karena pada penempatan rangkaian 2 membuat kapasitor yang terhubung
pada auxiliary winding menjadi tidak ikut dikontrol sehingga kapasitor bisa
memperbaiki faktor daya motor, tetapi hal ini tidak terjadi pada rangkaian 1.
Dari gambar 5 terlihat bahwa pada rangkaian 2 mempunyai
daya input yang lebih kecil rata-rata 0,92 watt dibandingkan dengan rangkaian
1pada putaran rendah.
Dari gambar 6 terlihat bahwa pada rangkaian 2 memiliki torsi
yang lebih besar rata-rata 0,0015 N-m dibandingkan dengan rangkaian 1.
Dari gambar 7 terlihat bahwa pada rangkaian 2 memiliki
efisiensi yang lebih baik rata-rata 15% dibandingkan dengan rangkaian 1.
Analisa Bentuk Gelombang
Berikut ini akan diambil bentuk-bentuk gelom- bang, dimana
titik-titik pengambilannya di berikan
pada gambar 8 dan gambar 12.

Gambar 8. Titik Pengukuran Rangkaian 1
Gambar 9.
Bentuk Gelombang Main Winding Dititik 3-4 Pada
Rangkaian 1

Gambar 10.
Bentuk Gelombang Kapasitor Dititik 4-5 Di Rangkaian 1

Gambar 11.
Bentuk Gelombang Di Auxiliary Winding Pada Titik 3-5 Di Rangkaian 1

Gambar 12. Titik Pengukuran Rangkaian 2
Gambar 13.
Bentuk Gelombang Main Winding Di Titik 2-3 Pada Rangkaian 2

Gambar 14.
Bentuk Gelombang Kapasitor Di Titik 4-5 Pada Rangkaian 2

Gambar 15.
Bentuk Gelombang Di Auxiliary Winding Pada Titik 2-5 Di Rangkaian 2
Analisa Gambar Gelombang pada Rangkaian 2:
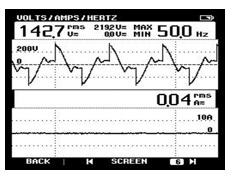
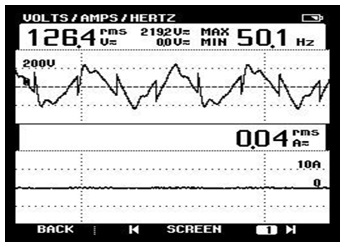
Bentuk
gelombang pada gambar 9 dan 13 adalah
gambar gelombang pada main winding. Karena tegangannya yang turun, maka
kecepatan motor turun juga, gambar
tersebut diambil pada kecepatan 1100
Rpm.
Bentuk
gelombang pada gambar 10 dan 14 adalah bentuk gelombang pada kapasitor, terlihat
pada rangkaian 1 bentuk gelombangnya
ter- pengaruh oleh rangkaian pengontrol kecepatan, sedangkan pada
rangkaian 2 tidak.
Bentuk gelombang pada gambar 11 dan 15 adalah bentuk
gelombang diauxiliary winding, disini terlihat jelas bahwa pada rangkaian
1 bentuk gelombangnya terdistorsi
akibat rangkaian pengontrolnya, sedangkan pada
rangkaian 2 tidak.
Kesimpulan
1.
Rangkaian pengontrol kecepatan yang ter- hubung pada main winding menunjukan tingkat efisiensi yang lebih baik
sebesar 15 % dibandingkan dengan rangkaian pengontrol yang terhubung pada suplai.
2.
Rangkaian yang terhubung pada main winding mempunyai torsi yang sedikit
lebih baik yaitu sebesar 0.0015 N-m dibandingkan dengan rangkaian yang
terhubung pada suplai
3.
Pada Rangkaian yang terhubung pada main winding, Cos ɸ yang dihasilkan lebih baik sebesar 0.029 dibandingkan dengan Rang-
kaian yang terhubung pada suplai.
4.
Dari bentuk gelombang yang
terukur menunjukan bahwa pada
rangkaian yang terhubung pada
main winding, tegangan dikapasitornya tidak ikut terkontrol, hal inilah yang
menyebabkan motor mempunyai tingkat efesiensi yang lebih baik.
Daftar Pustaka
[1] Berahim, Hamzah.,
Pengantar Teknik Tenaga
Listrik., Yogyakarta : Andi Offset, 1996.
[2] Herman, Stephen L.,
Electronics for Industrial
Electricians, New York : Delmar Publisher
Inc, 1989.
[3] Maloney, Timothy J.,
Industrial Solid-State Electronics, Englewood Cliffs, N.J.: Prentice-Hall, Inc.1979.
[4] Morris, Noel..,
Industrial Electronics, New York :Tata McGraw-Hill Publishing Company
Ltd. 1979.
[5] Richardson,Donald V.,
Rotating Electric Machinery and Transformer Technology, Englewood Cliffs, N.J.:
Prentice-Hall, Inc.1987.
[6]. Sundareswaran,K., An
Improved Energy- Saving Scheme
for Capacitor Run Induction Motor, IEEE Transactions on Industrial Electronics,
Vol 48, No.1, February 2001
[7]. Theraja, B.L., Text
Book of Electrical Techonology, New Delhi;
Publication Division of Nirja Construction & Development, 1984.
[8]. Wildi, Theoodore.,
Electrical Machines, Drives, and Power Systems, Englewood Cliffs, N.J.:
Prentice-Hall, Inc.1991.